|
|||||||||||||
 |
|||||||||||||
How Sonar Works
|
|||||||||||||
The fundamental principles of sonar (sound navigation and ranging) and radar (radio detection and ranging) are very similar. Oddly, the author never makes the comparison, and neither does he mention the makeup of the acronym. Although I am no sonar expert, I did work as an electronics technician with sonar system components while at the Westinghouse Oceanic Division in Annapolis, Maryland, back in the 1980s. And, as you might know, I was an Air Traffic Control Radar Repairman in the late1970 - early 1980s, so I have some experience there, too. While both sonar and radar have their own unique challenges regarding operational environments, I have to say the sonar system designer has more obstacles to overcome than does his radar counterpart. Factors affecting signal propagation which can lead to uncertainty in position, size, and speed are water salinity, temperature, pressure (at great depth), turbidity, turbulence, including often traversing multiple gradients between the source and the target. Wavelengths useful at long distances are too long for fine resolution images, but for close-up inspection, ultrasonic enable near photographic resolution. How Sonar Works - Fundamentals of sonar for finding submarines or fish
Fig. 1 - Sonar detects a submarine. The transmitted sonic energy is sent out as a series of pulses. The submarine target reflects the sound that strikes it and a portion of this reflection is picked up, and amplified and heard as an echo by the sonar operator. By A. N. Glennon Sonars are electronic devices which use underwater sounds to locate submarines. They can also be used to find fish and chart the ocean bottom. To detect submarines, sonars transmit a high-powered pulse of sound, called a ping, then listen for an echo. A submarine within detection range will return an audible echo. The sound of the echo depends on the frequency and pulse length of the ping, but is usually short and sharp with a metallic quality. The echo can also be made to show up as a bright spot on a PPI scope or as a deflection of an A-scope trace, The Navy does not have exclusive use of sonars. They are used by merchant ships, fishing boats and yachts, too - not to look for submarines, but to tell how deep the water is or to find fish. Sonars built for these purposes are often called echo sounders. A modern echo-ranging sonar can spot a submarine several miles away, under good conditions. It is usually mounted on a destroyer, with the operator in a protected location within the hull, and transducer mounted near the forward end of the ship, underwater on the keel. To detect a submarine, the sonar sends out a short pulse of sound, concentrated into a narrow conical beam (Fig. 1). The ping travels through the water, strikes the submarine and a small portion bounces back. This echo is picked up by the transducer, amplified and presented to the operator. A sonar transducer converts electrical energy to acoustic energy the same way a radio loudspeaker does. Like a loud-speaker, it will also convert acoustic energy back into an electrical signal, so the same transducer can be used for both transmitting and receiving. Since an echo can be down 120 db or more from the outgoing ping, sonar transducers must have a wide dynamic range.
Fig. 2 - Simplified block diagram of a typical echo-ranging sonar.
Fig. 3 - Audio circuit of an echo-ranging sonar.
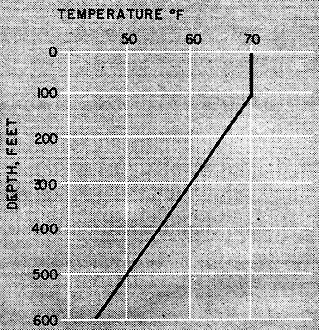
Fig. 4 - Typical temperature-depth distribution for deep ocean areas.
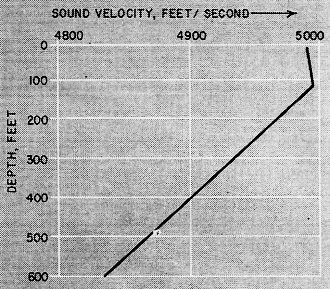
Fig. 5 - Sound-velocity distribution arising from temperatures in Fig. 4.
Fig. 6 - Sound-ray pattern generated by the velocity structure of Fig. 5. Part of the beam is bent upward, the rest downward, leaving shadow areas not scanned by sonar.
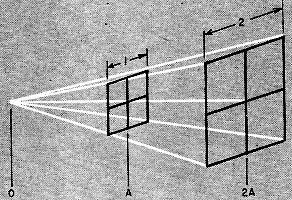
Fig. 7 - The effect of spreading. Sound which starts from source as O has spread to pass through an area 1-unit square at distance A. At distance 2A, the sound covers an area four times larger. Accompanying reduction in sound intensity is 6 db.
Fig. 8 - Spreading loss. There is a 6-db loss each time distance traveled doubles.
Fig. 9 - Echo-sounder record of ocean bottom.
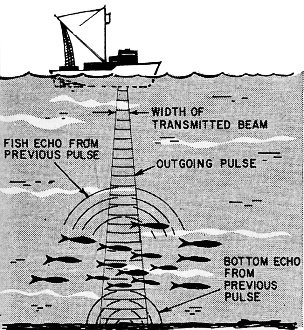
Fig. 10 - Fishing boat locating fish with vertical-beamed sonar. EDO Corp.
Fig. 11 - Fish-finder scope pattern showing fish 5 fathoms above the bottom. Difference between patterns is result of using different scales. Echo-Ranging Sonar The block diagram in Fig. 2 shows a typical echo-ranging sonar. There are five major assemblies: the operator's' console, transmitter, transducer, amplifier and receiver. The operator's console normally controls the outgoing power. A transmission pulse generated in the console triggers the transmitter's oscillator. At the same time, a keying pulse goes to the transmit-receive (T-R) switch in the amplifier, to disconnect the receiver for the duration of the ping. The transmitter pulse then proceeds through the T-R switch to the transducer. A keying pulse also goes. to the receiver. This helps protect the operator, from reverberations, which are very, strong for a second or two after each ping. The keying pulse reduces receiver gain, then lets it recover slowly as reverberations die away. Once the ping is transmitted, the T-R switch reconnects the preamplifier to the transducer. Received signals then proceed through the preamp to the receiver, where they are processed for presentation to the operator. The recorder indicated in the diagram uses chemically sensitized paper and a stylus to show the results of every ping. When a submarine has been detected, the recorder can be used to control the pinging rate. The keying pulse then originates at the recorder, instead of the console. The audio and video receivers for this sonar are similar. Fig. 3 is a block diagram of the audio section. In addition to the reverberation gain control, which is automatic, the operator's master gain control manually sets the final volume of the audio signal from the speaker or phones. Aside from the reverberation gain control circuits, the receivers are straightforward super-heterodyne designs.
Small echo sounder records ocean depth on sensitized paper. - EDO Corp. Sonar Headaches Although sonars have improved tremendously since the end of World War II, there are still, and always will be, problems associated with them. Even the best equipment is unable to cope with some of the phenomena of under-water sound transmission. To receive a useful echo, enough sound must be put into the water to compensate for losses in transmission. The most important losses are caused by refraction, spreading and absorption. Of all the factors that influence underwater sound, sea temperature has the greatest effect: sound travels faster in warmer water. Sound velocity in water is usually between 4,800 and 5,100 feet per second. The fact that it varies even over a small range of values presents problems, because any small change of velocity will cause enough refraction to handicap underwater communications or search. In point-to-point transmissions, which includes echo ranging, refraction reduces the intensity of received sound by bending sound beams away from where they are aimed, toward regions of slower velocity. The effect is so common that straight-line paths for sound are almost nonexistent. The severity of refraction varies from day to day, and communication or detection ranges can vary from several hundred yards to several thousand yards because of bending. In deep ocean areas, temperature varies considerably with depth. A fairly common temperature structure is shown in Fig. 4. Here, temperature is constant near the surface, then steadily decreases as depth increases. This structure causes velocity to vary as shown in Fig. 5. Velocity characteristics of this sort distort a sonar beam as shown in Fig. 6. Because there is a low-velocity region near the surface as well as a deep one, the beam splits into two parts, one bending toward the surface while the other is bent severely downward. Under these conditions, a very deep submarine, or one at periscope depth, might be picked up at a range of over 4,000 yards, while one at 100 feet depth could escape detection until the range was about 2,000 yards. In the "shadow zones," almost the entire signal is lost by refraction. Although some sound will scatter into the zone, the amount is negligible. As sound spreads out from its source, it gets weaker. The sound passing through a particular area in one place (Fig. 7) has to cover four times that area when it has gone twice as far from the source. This means a loss of 6 db each time the distance doubles. It is most severe near the source of the ping, amounting to 60 db in the first thousand yards but, as Fig. 8 shows, the effect decreases as distance increases. Absorption loss is created by molecular effects. Part of it is due to friction, part to molecular excitation. It increases with increasing frequency, and at 10 kc is about 2 db per thousand yards. Reverberations do not attenuate sound, but reduce the amount of useful echo by raising the background noise level. They are caused by back-scattering of sound from the surface or bottom, or from minute particles in the water. The effect is most serious in the first few seconds after a ping. In tracking a close-in target, reverberations can be high enough to blank the echo out completely. Acoustic echo ranging is a slow process. Sound travels about 1,600 yards a second in water, compared to 186,000 miles a second for rf energy in air. Since the ping has to make a round trip between transducer and target, sonar range is measured at a rate of 800 yards a second. A time-base sweep is provided to measure range. Accuracy is difficult to obtain, because of the variations that always occur in sound velocity. Velocity not only varies with depth, but also from place to place within the ocean, from day to day and throughout each day. This continuous variation makes it difficult to pick out one number to use as the velocity of sound. Sonar operators are forced to choose an average, based on the local velocity structure. With a properly chosen average set into the range unit, range errors due to velocity error will not be harmfully large.
Fishscope is compact unit used by commercial fisherman to locate fish. Depth Finders Echo sounders aren't affected greatly by the factors that create so much trouble in submarine detection. Since the beams are aimed straight down, refraction is no problem. Spreading and attenuation are compensated for by the hugeness of the bottom as a target. Echo sounders, as a result, are small and compact, and operate at low power. Even so, they must have all the components of a large sonar, or at least provide the same functions. The echo sounder shown in the photo is completely contained, except for the transducer, in a small cabinet that can be bulkhead-mounted. It was developed for the Navy as the AN/UQN-1B echo sounder, and has now been released for civilian use. It presents a permanent record of depth information on. sensitized paper (Fig. 9). This sort of equipment is useful in ocean survey work, and is also a valuable tool for navigators. In a fog, for example, echo-sounder information can be used to pilot ships within sighting distance of shore or navigational markers. Another small sonar is the Edo Fishscope. It does not give a permanent record, but provides an A-scope indication of water depth, and the depth of any fish that are within the beam. Fig. 10 shows a fishing boat about to receive echoes showing a school of fish just over the bottom. With this information, the fishermen can cast their nets where they know there are fish, and set the nets to the right depth to catch them. By using their Fishscope, they make more productive cruises. The instrument has two scales for presentation of its information. One shows all the water directly beneath the boat, to a depth of 250 fathoms. The other scale, available at the flip of a switch, shows any selected 10-fathom sector of this water. In Fig. 11, the Fishscope is indicating a school of fish about 5 fathoms from the bottom, as it appears on each of the two scales.
Posted May 24, 2024 |
|||||||||||||
 |
|||||||||||||
|
|||||||||||||









|
||||||||||||||||||||||||||||||||||||





























