Stable Microwave Oscillators
|
|
Long before digital communications was widely adopted, there was a great need for stable frequency-determining devices / systems. That is to say, low bit error rates (BER) for digital communications are not the sole motivation for oscillators with low short-term and long-term stability and low levels of jitter. One obvious need for precise frequency control is radar, in order for accurate ranging (the second "R" in radar) and in the case of Doppler systems, for accurate radial velocity reporting and clutter cancellation. Those capabilities existed long before digital systems came online. Aside from radar, precise frequency was needed in order to reduce guard band width between assigned channel assignments, thereby enabling more broadcast stations (commercial and military) to coexist in an allotted frequency band. This 1966 QST magazine article presents various automatic frequency control (AFC) topologies used for accomplishing frequency source stabilization. Stable Microwave Oscillators By Wilfred Jensby, WA6BQO
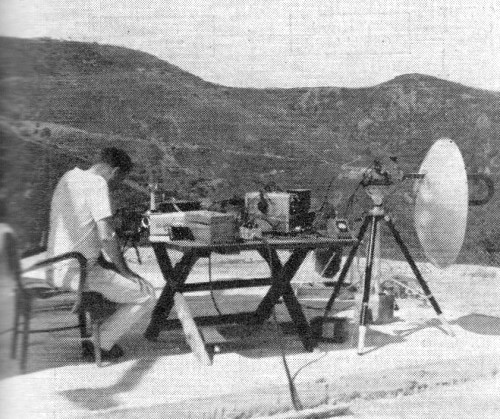
Glenn Tomlin, WA6KKK, with his C-band setup during an attempt to break the existing DX record. This installation was atop Lama Prieta Mountain near San Jose, California. The attempt failed because line-of-sight conditions were not established between the site shown and opposite end of the circuit - Yosemite Park, 135 miles distant.
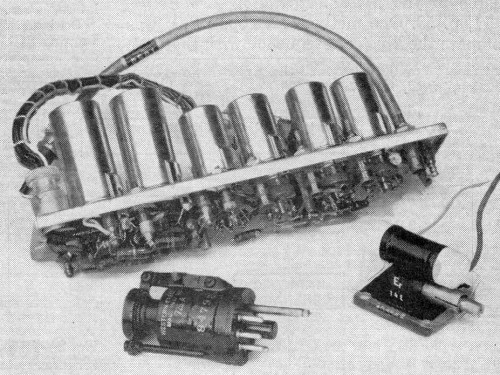
The tools of a microwave enthusiast. Shown here: a typical i.f. strip, an old-style klystron at the left, and a modern klystron tube at the right. The newer unit is an Eimac 1K20XE.
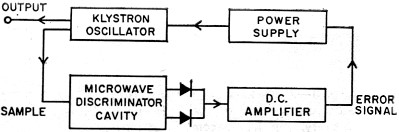
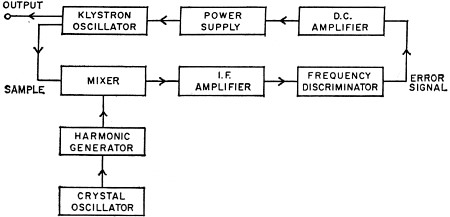
Fig. 1 - Block diagram of the cavity-stabilized automatic-frequency-control system.
Fig. 2 - An example of a crystal-stabilized i.f.-discriminator a.f.c. system. This method offers better stability than is possible with the arrangement shown in Fig. 1.
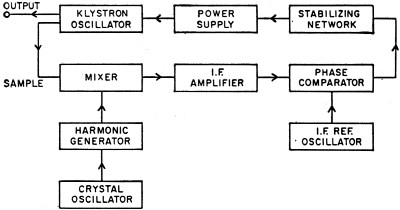
Fig. 3 - A crystal-stabilized i.f. phase comparator system of the a.p.c. variety. This has become a popular system among amateur microwave groups. The author of this article discusses, in general terms, the evolution of microwave stabilizing devices and offers some interesting advice on circuits for improving the effectiveness of the amateur microwave system. Being interested in the microwave frequencies for a number of years, and desiring to extend one of the microwave-band distance records, I chose the 5600-Mc. band for my experiments. In 1959, using 2K26 klystrons and the polaplexer system,1 a 3-mile contact was made between Jack Taylor, W7VCM, and myself. Since then, equipment problems and lack of time have prevented me from establishing any DX records. In 1960 I had the opportunity to accompany Len Garrett, W7JIP, while he and W7LHL extended the X-band distance record to 265 miles. Because of transportation problems to the tops of the mountains, exotic equipment was not used. In the case of W7JIP and W7LHL, 3- and 4-foot dishes were used, 1-watt klystrons provided the signal, and receiving i.f. strips with a 1-Mc. bandwidth were used. Waveguide balanced mixers were used ahead of the i.f. strips and cavity wavemeters were used to monitor the frequency of the klystrons. It is not an easy matter to set up a portable microwave link because considerable effort is required in aiming the parabolic antennas. Then, too, the transmitter frequency and power must be monitored, to say nothing of actually establishing the contact. It would appear, nevertheless, that a 250-mile distance record should be attainable on any of the microwave bands below X-band. Improving Present Techniques Most microwave enthusiasts have been working with klystrons that deliver 100 milliwatts of r.f. power output.2 Other operators have purchased 1-watt klystrons from war-surplus dealers. This power limitation suggests the need for improved techniques in the transmission and reception of microwave signals if greater coverage is desired. A significant improvement can be realized by switching from the more common wide-band i.f. system to narrow-band receiving techniques. Many i.f. strips being used have bandwidths on the order of 1 Mc., or more. By using a communications receiver with an i.f. bandwidth of 10 kc., a gain in sensitivity of approximately 20 decibels is possible - a gain which is not easily achieved by working with transmitters or antennas. (In microwave work, the antennas are usually limited in size to dishes that are between 4 and 6 feet in diameter because of transportation problems to mountain tops.) With increased i.f. selectivity, the microwave transmitter will require a frequency stability that is common to crystal-controlled transmitters designed for low-frequency use. If the polaplexer approach is not used, the receiver's local oscillator must also be quite stable. There are several ways to achieve signal stability at microwave frequencies. For future experiments, W7JIP plans to use a u.h.f. crystal-controlled transmitter which drives a klystron multiplier for X-band use.3 I have tried replacing the klystron multiplier with a varactor diode multiplier at 5600 Mc., but have had limited success to date. Perhaps if I were to mount the varactor diode directly in the waveguide the efficiency of the multiplier would be improved because of the excellent bandpass filter characteristics of the waveguide. Automatic Frequency Control By applying automatic frequency control (a.f.c.) to a klystron oscillator, a stable microwave signal can be secured. Methods for applying a.f.c. date back to World War II with information describing typical circuits and techniques being available in the M.I.T. Radiation Lab Series, Vol. 11, p. 58. One method developed then was to compare the klystron frequency with that of a high-Q microwave cavity which had a high short-term stability, and used a servo loop to control frequency drift. A frequency-sensitive device or discriminator was used to obtain the error voltage. One type of microwave discriminator developed was the 'Pound' discriminator4 which is effective but sensitive, and is difficult to adjust because of possible drift in the diodes and in the d.c. amplifier used in the system. Fig. 1 shows a simple block diagram of this scheme. The amount of stabilization obtained is dependent upon the voltage sensitivity of the klystron and the gain of the d.c. amplifier. The typical performance of a system such as this (at X-band) would be a center-frequency drift of about 10 kc. per degree C of the reference cavity because of temperature. A frequency drift as much as four times greater than this would result from d.c. drift in the a.f.c. system. To obtain better performance requires the use of expensive and bulky equipment. For this reason this system was not often used outside of microwave laboratories. Crystal Stabilized A.F.C. The system shown in Fig. 2 provides increased stability at a fixed frequency by mixing a sample of the klystron's output with the harmonic of a crystal oscillator-multiplier. This produces a low-frequency signal which might be 60, 30 or 10 Mc. The resultant signal is amplified by an i.f. strip and fed into an f.m. discriminator. The d.c. output from the discriminator is amplified and used to stabilize the oscillator frequency. The heterodyne method is capable of higher accuracy and stability than the direct comparison method provided the crystal oscillator is well designed and is temperature controlled. Generally, crystal-controlled v.h.f. oscillators provide a short-term stability of better than 1 part in 108 and aging rates of less than 1 part per million per week. Commercially available crystal and oven combinations provide temperature coefficients as low as 1 part in 108 per degree C. The stability of the i.f. discriminator is often the limiting factor in this system. As low an i.f. frequency as possible should be used in combination with good electrical and mechanical design to minimize drift of the discriminator center frequency. An f.m. superheterodyne receiver can be used with the added advantage, if tunable, of being able to move the klystron frequency while 'locked'. Fig. 4 contains a block diagram of a complete microwave transmitter-receiver using automatic frequency control. The system was developed by the San Bernardino Microwave Society, Inc. Automatic Phase Control The a.f.c. systems just described have never become too popular because they were never available as complete units, ready to connect to a klystron and power supply. Several years ago the Dymec Division of Hewlett-Packard Co. introduced an oscillator synchronizer which was designed for the purpose of phase-locking a klystron oscillator to a crystal-controlled reference signal and achieving a short-term stability of 1 part in 108/second. This unit eliminates all long-term drift with klystrons and minimizes the incidental f.m. caused by klystron noise, power-supply ripple, and mechanical shock. It can also be used for frequency modulation of the klystron by replacing the i.f. crystal-oscillator reference with a v.f.o.
Fig. 4 - The 3300-Mc. "Rock Lock" arrangement shown in this block diagram is being used at W61FE-W6OYJ, the San Bernardino Microwave Society, Inc.
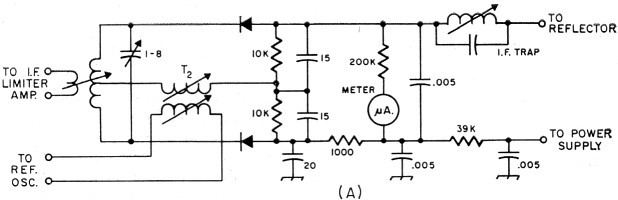
Fig. 5 - Some phase detection and stabilization circuits for microwave systems. The circuit at A is a balanced-input, diode phase detector and stabilizer (DYMEC Oscillator Synchronizer Handbook).
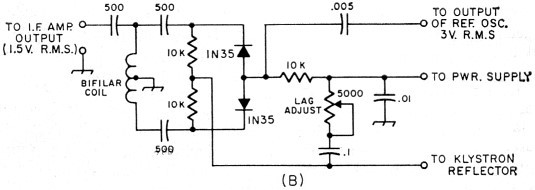
At B, the circuit of an unbalanced-input, diode phase detector and stabilizing network (Microwave Journal, Sept. 1964).
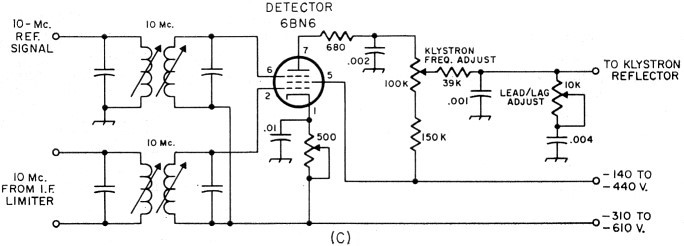
At C, a gated-beam tube phase detector and stabilizer (Electrical Design News, March 1962).
Shown at D, a switchable discriminator or phase detector circuit. In all circuits, resistors are in ohms, K = 1000. Decimal value capacitors are in u.f., others are pf. The automatic-phase-control system (a.p.c), shown in Fig. 3, is similar to the heterodyne a.f.c. technique, shown in Fig. 2, except that the discriminator and d.c. amplifier are replaced by a phase comparator and i.f. reference oscillator. The a.p.c. system is an electronic servo system which does not permit a steady-state frequency error to be developed between the controlled oscillator and the reference frequency. This improvement results from the integration of frequency change by the phase comparator, which produces an error proportional to phase, rather than frequency difference. The comparator output is passed through an RC stabilizing network and added in series with the normal reflector supply voltage to the klystron. The stabilizing network is essentially a simple low-pass filter which stabilizes the loop gain of the phase-lock system and prevents an oscillatory condition from developing. The phase comparator has a higher gain and larger voltage swing than the i.f. discriminator, which eliminates the need for d.c. amplification. This simplifies the circuit and also makes it easier to couple the control signal into the reflector circuit of the klystron, which may have a potential as high as -2000 v.d.c. However, klystrons used by hams, such as the 723A/B-2K25 series, use a reflector voltage between -300 and -700 volts which is not difficult to handle. The voltage swing available from a phase comparator can reach ±20 volts, providing as wide an electronic locking range as most klystrons can handle. For a typical klystron reflector tuning sensitivity of 1 Mc. per volt, this means a locking range of ±20 Mc. Once an oscillator is captured, or locked, the klystron reflector voltage can actually vary through a range of ±20 volts without changing klystron frequency or losing phase lock. If phase lock is lost, because the klystron shifted phase beyond the control range of the phase-comparator error voltage, the klystron jumps to the frequency to which it would normally have drifted had it not been locked. To return the klystron to a phase-lock condition it is necessary to retune it to a point within the locking range where the difference frequency at the phase comparator falls within a smaller range, known as the capture, or pull-in range. This capture range is determined by the locking range, but because the loop stabilization network controls the bandwidth of the system, the capture range is smaller than the locking range. For a locking range of ±20 Mc., the capture range is typically ±2 Mc. Most commercial equipment incorporates an automatic search oscillator which sweeps the klystron frequency near its natural frequency until it is captured by the phase-lock loop. This can be simply a 1-kc. sine wave or sawtooth signal which is added to the reflector voltage. Circuits Most of the parts of a microwave system are familiar to a v.h.f. amateur. Such circuits include i.f. amplifiers, discriminators, crystal oscillators and multiplier chains. The output frequency of the multiplier chain should be 200 Mc, or above, with a power output of about 1 milliwatt. This means that the design should be similar to that of a 432-Mc. converter's local oscillator. The multiplier energy drives a harmonic diode, or in some designs may drive the mixer diode directly. The r.f. power to the mixer diode from the klystron can be from 0.1 to 1 milliwatt. The output of the microwave mixer drives an i.f. amplifier which should have 50- to 7O-db. gain and a bandwidth of 10 to 20 per cent of center frequency. Surplus i.f. strips should be entirely satisfactory and can be modified, if necessary, to include one or two stages of limiting. Conventional discriminator and f.m. detector circuits are used in a.f.c. circuits. Typical phase-comparator detector circuits are shown in Fig. 5. The circuit of Fig. 5A can be used either as a discriminator or phase comparator and is found in some v.h.f. telemetry receivers. The circuit shown in Fig. 5C was used in a National Bureau of Standards X-Band receiver which had an i.f. bandwidth of 45 c.p.s. - illustrating the capability of the system, and the stability requirements of the reference oscillators. Additional information can frequently be obtained by writing to the manufacturers of microwave equipment and requesting instruction books with schematics. These can usually be purchased at a reasonable price. A possible future article will describe a complete C-Band microwave link with more details concerning construction. In the meantime, I hope that others will be making use of our amateur microwave bands.
1 Prechtel, "Experimental Transceivers for 5650 Mc.," QST, August, 1960. 2 Peterson, "Practical Gear for Amateur Microwave Communication," QST, June, 1963. 3 Garrett and Manly, "Crystal Control on 10,000 Megacycles," QST, November, 1963. 4 Pound, "Frequency Stabilization of Microwave Oscillators," Proc. IRE, December, 1947. - Benjaminson, "Phase Locking Microwave Oscillators To Improve Stability and Frequency Modulation," The Microwave Journal, January, 1963. - Peter and Strandberg, "Phase Stabilization of Microwave Oscillators," Proc. IRE, July, 1955.
Posted August 10, 2021 |
|